Publications
Patent
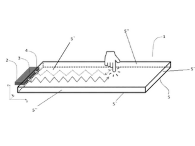 |
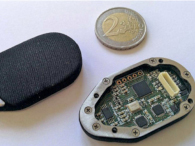
An optical tactile and pressure sensor Ilze Aulika, Karlis Kundzins, Martin Laurenzis, Emmanuel Bacher, Adolfo Muñoz Orbañanos, Jorge García Pueyo, Sergio Cartiel Embid WO2025178481A1 2025-08-28
Link |
Scientific
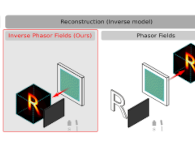 |
Forward and inverse diffraction in phasor fieldsJorge Garcia-Pueyo and Adolfo Muñoz. Opt. Express 33, 5, 11420–11441. 2025.
Paper Project page Bibtex |
 |
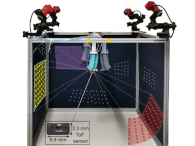
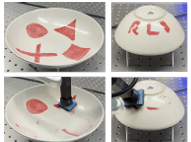
Influence of Material Optical Properties in Direct ToF LiDAR Optical Tactile Sensing: Comprehensive EvaluationIlze Aulika, Andrejs Ogurcovs, Meldra Kemere, Arturs Bundulis, Jelena Butikova, Karlis Kundzins, Emmanuel Bacher, Martin Laurenzis, Stephane Schertzer, Julija Stopar, Ales Zore, and Roman Kamnik. Materials 18, 14. 2025.
Paper Bibtex |
 |
Soft Robot Localization Using Distributed Miniaturized Time-of-Flight SensorsGiammarco Caroleo, Alessandro Albini, and Perla Maiolino. 2025 IEEE 8th International Conference on Soft Robotics (RoboSoft), 1–6. 2025.
Paper Preprint Conference site Bibtex |
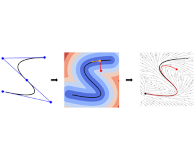 |
From Movement Primitives to Distance Fields to Dynamical SystemsYiming Li and Sylvain Calinon. IEEE Robotics and Automation Letters 10, 9, 9550–9556. 2025.
Paper Preprint Project page Bibtex |
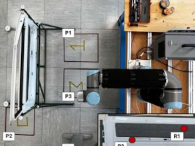 |
Workspace Sharing with Proximity-Aware Robots: a Pilot on User PerspectiveSimone Borelli, Sofia Morandini, Francesco Giovinazzo, Francesco Grella, Federico Fraboni, and Giorgio Cannata. Proceedings of the 2025 IEEE International Conference on Robot and Human
Interactive Communication (RO-MAN). 2025.
Bibtex |
 |
A Computational Load Evaluation for Proximity-aware ManipulatorsSimone Borelli, Francesco Giovinazzo, Francesco Grella, and Giorgio Cannata. Proceedings of the 2025 International Conference on Intelligent Autonomous Systems (IAS). 2025.
Conference program Bibtex |
 |
Generating Whole-Arm Avoidance Motion Through Localized Proximity SensingSimone Borelli, Francesco Giovinazzo, Alessandro Albini, Francesco Grella, and Giorgio Cannata. IEEE/ASME Transactions on Mechatronics, 1–12. 2025.
Paper Bibtex |
 |
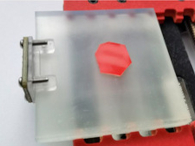
Time-of-flight signal processing for FTIR-based tactile sensorsJorge Garcia-Pueyo, Sergio Cartiel, Emmanuel Bacher, Martin Laurenzis, and Adolfo Muñoz. Opt. Express 33, 18, 38909–38925. 2025.
Paper Bibtex |
 |
Tactile Ergodic Coverage on Curved SurfacesCem Bilaloglu, Tobias Löw, and Sylvain Calinon. IEEE Transactions on Robotics 41, 1421–1435. 2025.
Paper Preprint Project page Bibtex |
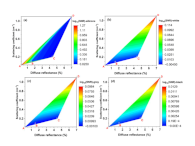 |
Characterizing material effects on direct ToF signal response in optical tactile systemsI. Aulika, A. Ogurcovs, M. Kemere, A. Bundulis, K. Kundzins, J. Butikova, A. Vembris, A. Sarakovskis, E. Bacher, M. Laurenzis, S. Schertzer, J. Stopar, A. Zore, R. Kamnik, M. Munih, S. Cartiel, J. Garcia-Pueyo, and A. Muñoz. Optical Sensors 2025, SPIE, 1352705. 2025.
Paper Preprint Bibtex |
 |
Estimating Scene Flow in Robot Surroundings with Distributed Miniaturized Time-of-Flight SensorsJack Sander, Giammarco Caroleo, Alessandro Albini, and Perla Maoilino. IEEE 34th International Conference on Robot and Human Interactive Communication (accepted). 2025.
Preprint Bibtex |
 |
Improving Tactile Gesture Recognition with Optical FlowShaohong Zhong, Alessandro Albini, Giammarco Caroleo, Giorgio Cannata, and Perla Maoilino. IEEE 34th International Conference on Robot and Human Interactive Communication (accepted). 2025.
Preprint Bibtex |
 |
Smooth Human–Robot Shared Control for Autonomous Orchard Monitoring With UGVsCheikh Melainine El Bou, Michele Focchi, Michael R. Chang, Marco Camurri, and Karl D. von Ellenrieder. IEEE Transactions on Automation Science and Engineering 22, 13603–13620. 2025.
Paper Bibtex |
 |
A cross-task visuo-tactile representation using point cloudsGiammarco Caroleo, Alessandro Albini, and Perla Maiolino. Intelligent Service Robotics. 2025.
Paper Bibtex |
 |
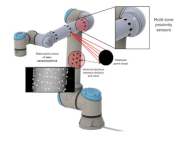
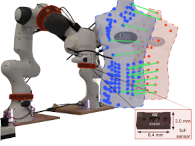
Tiny Lidars for Manipulator Self-Awareness: Sensor Characterization and Initial Localization ExperimentsGiancarlo Caroleo, Albini Alessandro, D. De Martini, T. D. Barfoot, and Perla Maiolino. IEEE/RSJ International Conference on Intelligent Robots and Systems (accepted). 2025.
Preprint Bibtex |
 |
Advancing Multi-Touch Sensing: Integrating FTIR and ToF Technologies for Precise and Large-Scale Touch InterfacesAndrejs Ogurcovs, Ilze Aulika, Sergio Cartiel, Meldra Kemere, Jelena Butikova, and Eriks Sledevskis. Sensors 25, 17. 2025.
Paper Bibtex |
 |
Robotic Depalletizing via Reinforcement Learning of a Pushing PolicyArgyris Dimou, Marios Kiatos, and Sotiris Malassiotis. Supply Chains, Springer Nature Switzerland, 105–117. 2025.
Paper Preprint Bibtex |
 |
Distilling Contact Planning for Fast Trajectory Optimization in Robot Air HockeyJulius Jankowski, Ante Marić, Puze Liu, Davide Tateo, Jan Peters, and Sylvain Calinon. Proceedings of Robotics: Science and Systems. 2025.
Paper Bibtex |
 |
Resource-Efficient GRU for Real-Time Gesture RecognitionMichail Kaseris, Sotiris Malassiotis, and Ioannis Kostavelis. 2025 11th International Conference on Automation, Robotics, and Applications (ICARA), 66–69. 2025.
Paper Preprint Bibtex |
 |
From CySkin to ProxySKIN: Design, Implementation and Testing of a Multi-Modal Robotic Skin for Human–Robot InteractionFrancesco Giovinazzo, Francesco Grella, Marco Sartore, Manuela Adami, Riccardo Galletti, and Giorgio Cannata. Sensors 24, 4. 2024.
Paper Bibtex |
 |
Updating design guidelines for cognitive ergonomics in human-centred collaborative robotics applications: An expert surveyLuca Gualtieri, Federico Fraboni, Hannah Brendel, Luca Pietrantoni, Renato Vidoni, and Patrick Dallasega. Applied Ergonomics 117, 104246. 2024.
Paper Bibtex |
 |
Extending the Cooperative Dual-Task Space in Conformal Geometric AlgebraTobias Löw and Sylvain Calinon. Proc. IEEE Intl Conf. on Robotics and Automation (ICRA). 2024.
Project page Preprint Code Bibtex |
 |
Representing Robot Geometry As Distance Fields: Applications to Whole-Body ManipulationYiming Li, Yan Zhang, Amirreza Razmjoo, and Sylvain Calinon. Proc. IEEE Intl Conf. on Robotics and Automation (ICRA). 2024.
Project page Preprint Code Bibtex |
 |
A Comprehensive Survey on Deep Learning Methods in Human Activity RecognitionMichail Kaseris, Ioannis Kostavelis, and Sotiris Malassiotis. Machine Learning and Knowledge Extraction 6, 2, 842–876. 2024.
Paper Bibtex |
 |
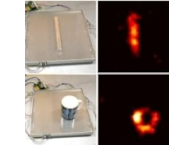
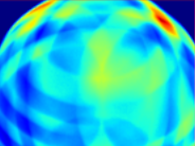
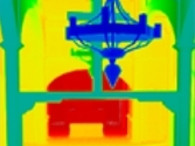
OptoSkin: Novel LIDAR Touch Sensors for Detection of Touch and Pressure Within Wave GuidesEmmanuel Bacher, Sergio Cartiel, Jorge García-Pueyo, Julija Stopar, Aleš Zore, Roman Kamnik, Ilze Aulika, Andrejs Ogurcovs, Jurǵis Grūbe, Arturs Bundulis, Jelena Butikova, Meldra Kemere, Adolfo Muñoz, and Martin Laurenzis. IEEE Sensors Journal 24, 20, 33268–33280. 2024.
Paper Bibtex |
 |
Online Learning of Continuous Signed Distance Fields Using Piecewise PolynomialsAnte Marić, Yiming Li, and Sylvain Calinon. IEEE Robotics and Automation Letters 9, 6, 6020–6026. 2024.
Paper Preprint Project page Bibtex |
 |
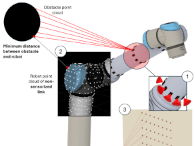
A Proxy-Tactile Reactive Control for Robots Moving in ClutterGiammarco Caroleo, Francesco Giovinazzo, Alessandro Albini, Francesco Grella, Giorgio Cannata, and Perla Maiolino. 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 733–739. 2024.
Paper Preprint Bibtex |
 |
Logic Learning From Demonstrations for Multi-Step Manipulation Tasks in Dynamic EnvironmentsYan Zhang, Teng Xue, Amirreza Razmjoo, and Sylvain Calinon. IEEE Robotics and Automation Letters 9, 8, 7214–7221. 2024.
Paper Preprint Project page Bibtex |
 |
GAFRO: Geometric Algebra for RoboticsTobias Löw, Philip Abbet, and Sylvain Calinon. IEEE Robotics & Automation Magazine, 2–12. 2024.
Paper Preprint Bibtex |
 |
Configuration Space Distance Fields for Manipulation PlanningY. Li, X. Chi, A. Razmjoo, and S. Calinon. Proc. Robotics: Science and Systems (RSS). 2024.
Paper Preprint Project page Bibtex |
 |
Design, Implementation and Testing of an EtherCAT-based Network for Multi-modal Distributed Sensing ArchitecturesFrancesco Giovinazzo, Alessandro Perri, Marco Staiano, Francesco Grella, Marco Sartore, Manuela Adami, Riccardo Galletti, and Giorgio Cannata. 2024 IEEE 20th International Conference on Automation Science and Engineering (CASE), 830–837. 2024.
Paper Bibtex |
 |
Recursive Forward Dynamics for Serial Kinematic Chains using Conformal Geometric AlgebraT. Löw and S. Calinon. Proc. Intl Workshop on the Algorithmic Foundations of Robotics (WAFR). 2024.
Paper Project page Bibtex |
 |
Geometric Algebra for Optimal Control With Applications in Manipulation TasksTobias Löw and Sylvain Calinon. IEEE Transactions on Robotics, 1–15. 2023.
Paper Preprint Project page Bibtex |
 |
Assessing the Relationship between Cognitive Workload, Workstation Design, User Acceptance and Trust in Collaborative RobotsTommaso Panchetti, Luca Pietrantoni, Gabriele Puzzo, Luca Gualtieri, and Federico Fraboni. Applied Sciences 13, 3. 2023.
Paper Bibtex |
 |
Whole-Body Ergodic Exploration with a Manipulator Using DiffusionCem Bilaloglu, Tobias Löw, and Sylvain Calinon. IEEE Robotics and Automation Letters, 1–7. 2023.
Paper Preprint Project page Bibtex |
 |
Mathematical Model and Experimental Characterization of Vertically Stacked Capacitive Tactile SensorsGiulia Baldini, Marco Staiano, Francesco Grella, Mattia Frascio, Perla Maiolino, and Giorgio Cannata. IEEE Sensors Journal 23, 18, 21341–21354. 2023.
Paper Bibtex |
 |
Guidelines for the integration of cognitive ergonomics in the design of human-centered and collaborative robotics applicationsLuca Gualtieri, Federico Fraboni, Hannah Brendel, Patrick Dallasega, Erwin Rauch, and Luca Pietrantoni. Procedia CIRP 120, 374–379. 2023.
Paper Bibtex |
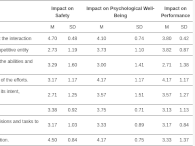 |
Evaluating Organizational Guidelines for Enhancing Psychological Well-Being, Safety, and Performance in Technology IntegrationFederico Fraboni, Hannah Brendel, and Luca Pietrantoni. Sustainability 15, 10. 2023.
Paper Bibtex |
Posters
| OptoSkin: Novel LIDAR Touch Sensors for Detection of Touch and Pressure within Wave guidesJorge Garcia-Pueyo, Emmanuel Bacher, Ales Zore, Julija Stopar, Roman Kamnik, Jurgis Grube, Meldra Kemere, Jelena Butikova, Arturs Bundulis, Andrejs Ogurcovs, Ilze Aulika, Adolfo Muñoz, Sergio Cartiel, and Martin Laurenzis. Jornada de Jóvenes Investigadores del I3A 13. 2025. Paper Bibtex |
| Advancing Multi-Touch Sensing: Integrating FTIR and ToF Technologies for Precise and Large-Scale Touch Interfaces ICRA 2024 Workshop on ProxyTouch. Whole-body Proxy-Tactile Architectures for Industrial and Service Applications. Yokohama, Japan, 13th May 2024. |
| OptoSkin: Touch Localization with Direct Time-of-Flight Measurements I. Aulika, E. Bacher, A. Bundulis, J. Butikova, S. Cartiel, J. Garcia, R. Kamnik, M. Kemere, K. Kundzins, M. Laurenzis, M. Munih, A. Muñoz, A. Ogurcovs, A. Sarakovskis, S. Schertzer, J. Stopar, A. Vembris, A. Zore. ICRA 2024 Workshop on ProxyTouch. Whole-body Proxy-Tactile Architectures for Industrial and Service Applications. Yokohama, Japan, 13th May 2024. |
| mitransient: Transient light transport in Mitsuba 3. Diego Royo, Miguel Crespo, Jorge García-Pueyo ICCP (International Conference on Computational Photography). EPFL, Lausanne, Switzerland. 22th-24th July, 2024 Poster Abstract Source code Video |
| Developing Self-Standing Robot Systems for Safe Human-Robot Collaboration in Dynamic Environments: The Sestosenso Project. HFES-Europe Chapter Annual Meeting. Liverpool, U.K, 26th -28nd April, 2023. |
| Improving and Extending Design Guidelines for Human-Robot Collaboration in the Workplace. HFES-Europe Chapter Annual Meeting. Liverpool, U.K, 26th -28nd April, 2023. |
Oral presentations
| Screen printed tactile sensors Peter Andersson-Ersman. Invited talk at ICRA 2024 Workshop on ProxyTouch. Whole-body Proxy-Tactile Architectures for Industrial and Service Applications. Yokohama, Japan, 13th May 2024. Workshop site |
| Challenges in Robotic Grocery picking and Innovation at Ocado Technology Jelizaveta Konstantinova. Invited talk at ICRA 2024 Workshop on ProxyTouch. Whole-body Proxy-Tactile Architectures for Industrial and Service Applications. Yokohama, Japan, 13th May 2024. Workshop site |
| Sparse optical sampling in the close proximity of an robotic arm Martin Laurenzis. Invited talk at ICRA 2024 Workshop on ProxyTouch. Whole-body Proxy-Tactile Architectures for Industrial and Service Applications. Yokohama, Japan, 13th May 2024. Workshop site |
| Geometric representations for whole-body manipulation learning and optimization Sylvain Calinon. Invited talk at ICRA 2024 Workshop on ProxyTouch. Whole-body Proxy-Tactile Architectures for Industrial and Service Applications. Yokohama, Japan, 13th May 2024. Workshop site |
| Perla Maioino. ICRA 2024 Workshop on Supervised autonomy: how to shape human-robot interaction from the body to the brain Yokohama, Japan, 17th May 2024. Workshop site |
| Proxy-tactile technology and tactile data generation for robot self-awareness and control Perla Maioino. ICRA 2024 Workshop on Robot Embodiment through Visuo-Tactile Perception. Yokohama, Japan, 17th May 2024. Workshop site |
| Robotic depalletizing via reinforcement learning of a pushing policy Argyrios Dimou, Marios Kiatos and Sotiris Malassiotis. 5th ICSC Intl. Conference on Supply Chains, May 2024 Workshop site |
| Assessing the Effect of a Novel Adaptive Automation Approach for Enhanced Human-Robot Collaboration Federico Fraboni. IEA – International Ergonomic Association 22nd Triennial Congress, Jeju, KR, 25th-29th August, 2024 |
| Human-centric automation in industry: Workers’ self-efficacy, technology acceptance, and performance effects in collaboration with adaptive robots Federico Fraboni. AIP – Italian Organizational Psychology Conference, Bergamo, IT, 4th - 7th September, 2024 |
| Addressing Human Factors and Cognitive Ergonomics in Human-Robot Collaboration – An Experts’ Survey. AIP – Italian Organizational Psychology Conference. Cagliari, IT, 5th -9th September, 2023. |
| Collaborative Industrial Robotics Systems for Optimal Human-Machine Interaction: Strategies for the Human-Robot Workforce. CYPSY, Cyber Psychology Conference. Paris, FR, 11th – 13th July, 2023. |
| Development of a Toolkit for Improving Workers’ Well-being in Collaborative Robotics. EAWOP, European Organizational Psychology Conference. Katowice, PL, 24th – 27th May, 2023. |
Previous
 |
Non-line-of-sight transient renderingDiego Royo, Jorge García, Adolfo Muñoz, and Adrian Jarabo. Computers & Graphics 107, 84–92. 2022.
Paper Source code Bibtex |
 |
Structure-aware parametric representations for time-resolved light transportDiego Royo, Zesheng Huang, Yun Liang, Boyan Song, Adolfo Muñoz, Diego Gutierrez, and Julio Marco. Optics Letters 47, 19, 5212–5215. 2022.
Bibtex |
 |
Fabric Classification Using a Finger-Shaped Tactile Sensor via Robotic SlidingSi-ao Wang, Alessandro Albini, Perla Maiolino, Fulvio Mastrogiovanni, and Giorgio Cannata. Frontiers in Neurorobotics 16. 2022.
Bibtex |
 |
An Atlas for the Inkjet Printing of Large-Area Tactile SensorsGiulia Baldini, Alessandro Albini, Perla Maiolino, and Giorgio Cannata. Sensors 22, 6, 2332. 2022.
Bibtex |
 |
Tactile-based human-robot collaboration: a performance analysisF Grella, R Canale, F Giovinazzo, A Albini, and G Cannata. Springer, 437–445. 2022.
Bibtex |
Other
| Project visit card PDF |
| Project brochure PDF |
| Project web site Link |